
Afiliacja
1 Politechnika Częstochowska, Wydział Budownictwa
* Kontakt / Correspondence: witold.paleczek@pcz.pl
DOI: 10.65545/GWITS.2026.01.04, GWiTS 1/2026, styczeń 2026
Pobierz PDF (Open Access)
Streszczenie:
Artykuł analizuje możliwość zastosowania praw skalowania hydrodynamicznego w projektowaniu płetw dla pływających robotów humanoidalnych, przeznaczonych do realizacji wymagających i ryzykownych prac podwodnych w budownictwie hydrotechnicznym oraz technice sanitarnej. Wykazano, że długość płetwy odgrywa kluczową rolę w efektywności szybkiego przemieszczania się, co może znaleźć zastosowanie w zadaniach takich jak dostarczanie sprzętu nurkom w kesonach czy transport materiałów w środowisku podwodnym. Przedstawione zależności matematyczne stanowią narzędzie wspierające dobór optymalnych parametrów płetw w praktyce inżynierskiej. Zaprezentowane algorytmy modelowania mogą być wykorzystane nie tylko w kontekście robotów humanoidalnych, lecz także w odniesieniu do pływającego człowieka, rozszerzając zakres potencjalnych zastosowań. Przedstawiono obliczenia dotyczące posuwu płetw robota humanoidalnego typu Morphobot. Konstrukcja robota umożliwia transformację z konfiguracji humanoidalnej do sirenoidalnej poprzez wymianę dolnego segmentu na część ogonową zintegrowaną z monopłetwą. Wykazano, że zastosowanie jednej monopłetwy na obie nogi eliminuje redundancję funkcjonalną, natomiast integracja monopłetwy z modułem ogonowym zwiększa niezawodność. Najwyższy poziom redundancji osiąga się przy użyciu dwóch oddzielnych płetw mocowanych na każdej nodze w wydłużonych kaloszach z paskami i klamrami, co określono jako mocowanie hybrydowe.
Słowa kluczowe: hydrodynamika płetw, prawa skalowania, roboty humanoidalne; budownictwo podwodne, inżynieria hydrotechniczna, technika sanitarna, projektowanie bioinspirowane, lokomocja robotów, bezpieczeństwo podwodne, robotyka wodna
Abstract:
The article analyzes the applicability of hydrodynamic scaling laws in the design of fins for swimming humanoid robots intended to perform demanding and high‑risk underwater tasks in hydraulic engineering and sanitary technology. It is demonstrated that fin length plays a crucial role in the efficiency of rapid locomotion, which may be applied to tasks such as delivering equipment to divers in caissons or transporting materials in underwater environments. The presented mathematical relationships provide a tool supporting the selection of optimal fin parameters in engineering practice. The proposed modeling algorithms can be applied not only in the context of humanoid robots but also to human swimming, thereby extending the range of potential applications. Calculations are presented for the propulsion generated by the fins of a humanoid robot of the Morphobot type. The robot’s design enables transformation from a humanoid to a sirenoid configuration by replacing the lower body segment with a tail module integrated with a monofin. It is shown that the use of a single monofin attached to both legs eliminates functional redundancy, whereas integration of the monofin with a dedicated tail module increases reliability. The highest level of functional redundancy is achieved when two separate fins are mounted on each leg in elongated boots reaching mid‑calf, equipped with fastening straps and buckles. This solution, referred to as hybrid mounting, ensures functional redundancy by allowing task continuation even in the event of the loss of one fin.
Keywords: fin hydrodynamics, scaling laws, humanoid robots, underwater construction, hydraulic engineering, sanitary technology, bioinspired design, robot locomotion, underwater safety, aquatic robotics
1. Wprowadzenie
Prace podwodne w budownictwie hydrotechnicznym oraz technice sanitarnej należą do najbardziej wymagających i ryzykownych zadań inżynierskich. Wykonywane tradycyjnie przez nurków w kesonach, kanałach czy zbiornikach, wiążą się z wysokimi kosztami, ograniczeniami czasowymi i zagrożeniem dla zdrowia. Rozwój robotyki humanoidalnej otwiera nowe możliwości w tym obszarze, pozwalając na projektowanie maszyn zdolnych do realizacji trudnych prac pod wodą. Celem niniejszej pracy jest integracja teorii hydrodynamiki płetw, z praktycznym kontekstem budownictwa hydrotechnicznego i techniki sanitarnej, ze szczególnym uwzględnieniem porównania pracy płetwy średniej względem płetwy długiej – zagadnienia, które nie pojawia się w dotychczasowej literaturze. Równocześnie położono nacisk na hybrydowe mocowanie płetw w pływających robotach humanoidalnych (kaloszowo‑paskowe), również nieuwzględniane w dotychczasowych opracowaniach. Zamiast ograniczać się do badań laboratoryjnych, artykuł podkreśla aplikacyjny wymiar proponowanych rozwiązań – transport sprzętu, inspekcje czy budowę w kesonach – wskazując ich znaczenie w realnych, ryzykownych pracach podwodnych. Globalna perspektywa pokazuje, że zaprezentowane modele mogą inspirować zarówno polskich inżynierów, jak i międzynarodowe ośrodki zajmujące się rozwojem humanoidalnych robotów, poszukujące bioinspirowanych i praktycznych rozwiązań.
2. Przegląd literatury
W polskiej literaturze przedmiotu zagadnienia biomechaniki i metodyki pływania omawiane są przede wszystkim w ujęciu dydaktycznym i teoretycznym. Klasyczne opracowania [1] oraz [5] przedstawiają podstawy teorii pływania, akcentując ekonomię ruchu i zasady efektywności, natomiast w [7] oraz [22] rozwijany jest kontekst metodyczny nauczania oraz treningu. W [9] wprowadzana jest szersza perspektywa fizyki sportu, obejmującą mechanikę ruchu w wodzie. W literaturze międzynarodowej problem hydrodynamiki płetw został podjęty w badaniach [23, 24] wykazano wpływ długości i sztywności płetw na ekonomię i efektywność pływania. Nowsze prace, takie jak [6], analizują kinematykę i koszt energetyczny użycia płetw w pływaniu, a w [18] proponowane są prawa skalowania dla płetw ogonowych, istotne według autorów dla modelowania hydrodynamiki. Wspólnie źródła te tworzą komplementarny obraz: polskie opracowania dostarczają kontekstu dydaktycznego i teoretycznego, natomiast badania międzynarodowe stanowią empiryczny fundament do wyznaczania parametrów takich jak kv, współczynników ciągu i oporu oraz do budowy modeli matematycznych, opisujących efektywność płetw. Tak zarysowany przegląd wskazuje na lukę badawczą, którą niniejszy artykuł stara się wypełnić poprzez aplikacyjne ujęcie problemu.
Badania przedstawione w pracach [20] oraz [8] wykazały, że efektywność napędu płetwowego jest silnie związana z liczbą Strouhala, utrzymywaną w przedziale 0,2–0,4. W tym zakresie obserwuje się optymalne wartości współczynnika ciągu CT, zwykle mieszczące się między 0,2 a 0,6. Wyższe wartości, sięgające 0,7–0,8, pojawiają się w warunkach dużych amplitud wychylenia i dobrze zestrojonej kinematyki, ale są traktowane jako graniczne. Dlatego w niniejszej pracy przyjęto zakresy CT.medium ∈ [0,2-0,5] dla płetw średnich oraz CT.long ∈ [0,3 – 0,6] dla płetw długich, z uwzględnieniem wartości granicznych do 0,8 jako przypadków wysokiej sprawności.
Eksperymenty hydrodynamiczne opisane przez autorów prac [12 – 15, 17] pokazały, że opór płetw w ruchu oscylacyjnym jest silnie zależny od kąta natarcia i separacji strugi. Wartości współczynnika oporu CD dla płetw i korpusów ryb mieściły się typowo w przedziale 0,4 – 1,3, przy czym górne wartości odpowiadały dużym kątom wychylenia i silnej separacji. W niniejszej pracy przyjęto zakresy CD.medium ∈ [0,4 – 1,0] dla płetw średnich oraz CD.long ∈ [0,5 – 1,3] dla płetw długich, z rozszerzeniem do 1,2–1,5 jako granicznych przypadków, aby objąć pełne spektrum obserwowanych konfiguracji.
Współczesne badania nad bioinspirowanymi robotami podwodnymi opisano w [4]; w pracy [2] potwierdzono, że przyjęte zakresy współczynników są zgodne z praktyką inżynierską. Roboty wykorzystujące płetwy oscylacyjne osiągają CT ∈ [0,3 – 0,6] przy umiarkowanych amplitudach i częstotliwościach, a wartości CD ∈ [0,5 – 1,2] są typowe dla pracy w warunkach rzeczywistych. Uwzględnienie wartości granicznych w niniejszej pracy, pozwala na porównanie, zarówno konfiguracji nominalnych, jak i ekstremalnych, co zwiększa uniwersalność modelu i jego przydatność w analizach zarówno biologicznych, jak i robotycznych. W pracy [21] ukazano mechanikę wirów wytwarzanych przez oscylujące płetwy/foils. Badania te wykazały, że odpowiednie kształtowanie śladu wirów może zwiększać efektywność generowania ciągu, co stało się kluczowe dla projektowania bioinspirowanych robotów wodnych. W pracy [19] przedstawiono przegląd biomechaniki pływania stylem dowolnym (front crawl). W [3] oraz [10, 11] analizowane są zależności między techniką ruchu, oporem hydrodynamicznym i efektywnością lokomocji, co dostarcza praktycznych danych dla dydaktyki sportowej i inspiracji dla inżynierii płetw humanoidalnych robotów.
3. Dobór płetw – rozwiązania konstrukcyjne
W celu zapewnienia maksymalnej stabilności mocowania płetw, w pływających robotach humanoidalnych proponuje się rozwiązanie hybrydowe, w którym kalosz obejmuje stopę oraz dolną część łydki, a jego konstrukcja jest dodatkowo wzmacniana systemem bocznego zapinania. Mocowanie realizowane jest po stronie zewnętrznej łydki za pomocą szeregu elastycznych, równoległych opasek o pełnym obwodzie (360°), które równomiernie rozkładają nacisk i zapobiegają zsunięciu płetwy, nawet w przypadku zaczepienia o wystający element. Każda z opasek wyposażona jest w zakładkę z zamkiem samoblokującym, działającym w sposób dociągający, co gwarantuje pewne i trwałe utwierdzenie płetwy przy jednoczesnej możliwości szybkiej regulacji. Takie rozwiązanie łączy zalety mocowania „kaloszowego” (full‑foot fins) i „paskowego” (open‑heel fins), tworząc system odporny na uszkodzenia mechaniczne, stabilny hydrodynamicznie i praktyczny w eksploatacji. Przez „mocowanie kaloszowe” rozumie się konstrukcję obejmującą całą stopę, analogiczną do płetw typu full‑foot stosowanych w sprzęcie nurkowym. Proponowane rozwiązanie stanowi nowatorski wariant hybrydowego mocowania, łączący zalety obu systemów i dostosowany do specyfiki prac podwodnych. Na ilustracji (rys. 1) przedstawiono trzy modele robotów humanoidalnych z opisanym systemem mocowania płetw; obrazy wygenerowano za pomocą systemu AI Copilot (Microsoft), na podstawie opisu modelu matematycznego. Zagadnienie redundancji funkcjonalnej pływającego robota humanoidalnego w konfiguracjach: z pojedynczymi płetwami na każdej nodze, z monopłetwą na dwóch nogach oraz z monopłetwą zintegrowaną w modelu humanoidalno‑sirenoidalnym typu Morphobot opisano w końcowej części opisu modelu matematycznego wraz z odpowiednimi ilustracjami.
Morphobot to humanoidalny robot o budowie modułowej, umożliwiającej transformację z konfiguracji humanoidalnej do sirenoidalnej, poprzez wymianę dolnej części ciała (miednicy z nogami) na segment ogonowy zintegrowany z monopłetwą. Nazwa pochodzi od greckiego morphē („kształt, forma”) oraz bot („robot”), wskazując na zdolność do morfologicznej zmiany. Konstrukcja Morphobota pozwala na badania nad różnymi wariantami napędu płetwowego, w tym układami o zróżnicowanej redundancji funkcjonalnej.
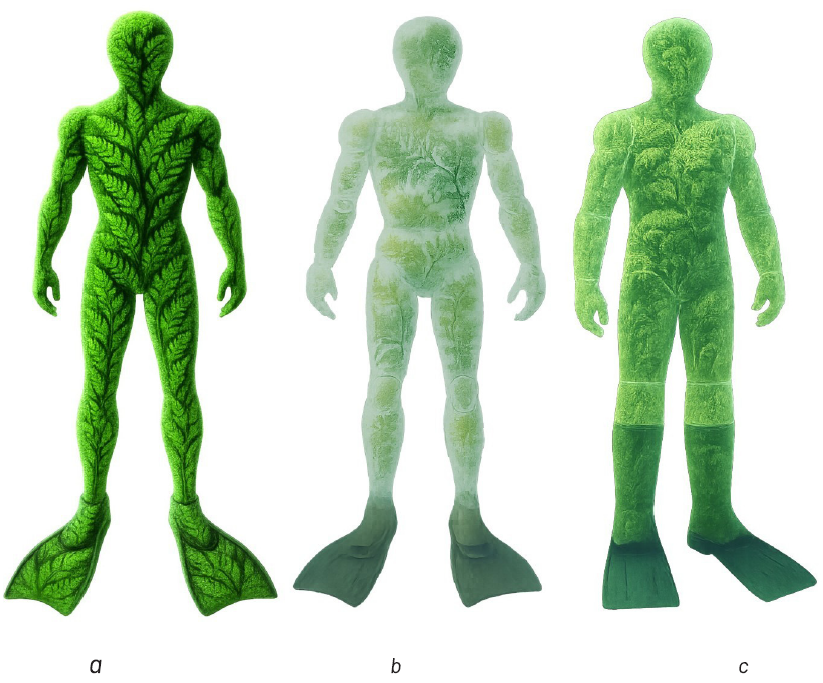
Fig. 1. Humanoid robot with fins
Rys. 1. a) Humanoidalny robot w klasycznych płetwach typu „kaloszowego” (full foot), obejmujących stopę do wysokości kostki. Sylwetka wypełniona fraktalami Barnsleya jako wizualizacja bioinspirowanego modelu lokomocji podwodnej. b, c) Humanoidalny robot w płetwach z rozszerzonym mocowaniem „kaloszowym”, obejmującym stopę powyżej kostki oraz część łydki. Rozwiązanie hybrydowe ilustruje zwiększoną stabilność i odporność na zsunięcie w warunkach podwodnych. Ilustracje wygenerowane przez system AI Copilot (Microsoft) na podstawie opisu modelu matematycznego, stanowią przykład współpracy człowieka i sztucznej inteligencji w procesie twórczym [16].
Fig. 1. a) Humanoid robot equipped with classic “full‑foot” fins covering the foot up to the ankle. The silhouette is filled with Barnsley fractals as a visualization of a bio‑inspired underwater locomotion model. b, c) Humanoid robot with extended “full‑foot” fin mounting, covering the foot above the ankle and part of the calf. The hybrid solution illustrates increased stability and resistance to slipping in underwater conditions. Illustrations generated by the AI Copilot (Microsoft) system based on the mathematical model description, representing an example of human–AI collaboration in the creative process [16].
4. Model matematyczny posuwu robota humanoidalnego w cyklu pracy nóg – porównanie płetw długich i średnich
Model stanowi powtarzalną ramę obliczeniową, umożliwiającą oszacowanie i porównanie przemieszczenia (posuwu) robota humanoidalnego na cykl pracy nóg, w przypadku płetw długich (long) o zakresie długości Llong ∈ [0,60 – 0,90] oraz płetw średnich (medium) o zakresie długości Lmedium ∈ [0,40 – 0,55] [m], przy tych samych zakresach kąta wychylenia, niezależnie od tempa osiągania tego kąta. Główne obliczenia dotyczą kąta biodrowegoα, który stanowi podstawowy parametr sterujący napędem płetwowym robota i determinuje średni ciąg oraz postęp na cykl. W modelu stosuje się również kąt uśredniony αavg, odzwierciedlający wartość średnią w cyklu ruchu, co pozwala na opis efektywności napędu w stanie ustalonym, tj. średni kąt natarcia w cyklu, stosowany m.in. w projekcji tzw. powierzchni „zamiatania” oraz w oszacowaniu wartości współczynników oporu, (powierzchnia „zamiatania”: to powierzchnia efektywnego wychylenia płetwy, obszar zakreślony przez ruch końcówki płetwy (z ang: swept area). Kąt kolanowy oraz kąt skokowy traktowane są jako manewrowe lub korygujące – wykorzystywane w sytuacjach wymagających nagłego przyspieszenia, zmiany kierunku lub precyzyjnego ustawienia płetwy. W podstawowym modelu nie są one uwzględniane we wzorach ciągu, lecz mogą być dodatkowo opisane parametrycznie jako źródło chwilowej dynamiki.
5. Oznaczenia zmiennych w modelu z zakresami empirycznymi
Aby zobaczyć oznaczenia zmiennych w modelu Pobierz PDF
6. Zestaw zależności matematycznych w modelu
Aby zobaczyć zestaw zależności matematycznych Pobierz PDF
7. Porównanie gęstości materiału płetw
Płetwy średnie charakteryzują się zazwyczaj mniejszą masą niż płetwy długie. W konsekwencji, zamiana płetw typu ‘medium’ płetwami typu ‘long’ prowadzi do zaburzenia bilansu wyporności układu. Aby zachować niezmienną wyporność netto, należy utrzymać założony iloraz objętości Vmedium/Vlong oraz spełnić następujący warunek określony wzorem (15)
ρm.long = ρw – (ρw – ρm.medium) x (Vmedium / Vlong) (15)
gdzie: ρm.long – gęstość wody, ρm.medium – gęstość materiału płetwy średniej, ρm.long – gęstość materiału płetwy długiej.
W praktyce oznacza to, że materiał płetwy długiej (long) powinien mieć gęstość mniejszą niż materiał płetwy średniej (medium), proporcjonalnie do różnicy ich objętości.
Konfiguracja z pojedynczą monopłetwą w robotach humanoidalnych charakteryzuje się ograniczoną redundancją funkcjonalną, w porównaniu z układem dwóch niezależnych płetw umieszczonych na lewej i prawej nodze. Z perspektywy bezpieczeństwa i niezawodności systemu brak redundancji dyskwalifikuje monopłetwę jako rozwiązanie napędowe w pływających robotach humanoidalnych, przedstawionych na rysunkach (rys. 1a, b, c) oraz (rys. 2b). Na rys. 3 zaprezentowano wizualizację poglądową: monopłetwy dwupaskowej na dwie nogi, monopłetwy jednopaskowej na dwie nogi oraz płetwy z mocowaniem hybrydowym w dwóch wariantach – z paskami skośnymi na wydłużonym kaloszu sięgającym połowy łydki oraz z paskami równoległymi na części kaloszowej. Przedstawione obliczenia odnoszą się do posuwu jednej z dwóch płetw robota humanoidalnego. Na rys. 2 zaprezentowano robota humanoidalno‑sirenoidalnego typu Morphobot, w którym monopłetwa została zintegrowana z członem zastępującym obie nogi. Po odłączeniu dolnej części humanoida i zamontowaniu modułu ogonowego, robot przyjmuje konfigurację sirenoidalną, w której obliczenia mogą być zastosowane do jednej monopłetwy.
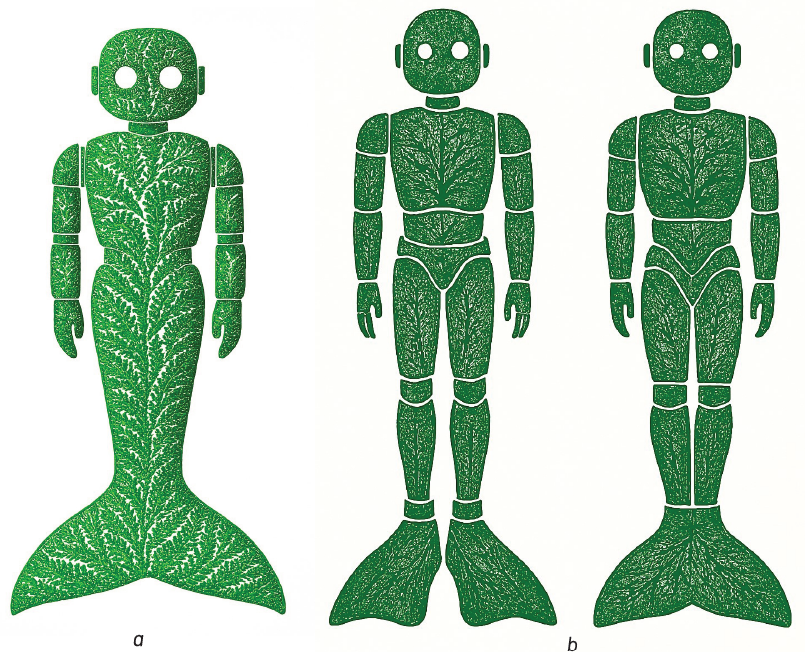
Fig. 2. Humanoid–sirenoid Morphobot robot
Rys. 2. a) Schemat poglądowy robota humanoidalnego przekształconego w robota humanoidalno‑sirenoidalnego typu Morphobot; b) schematy poglądowe robota humanoidalnego wyposażonego odpowiednio w dwie płetwy z krótkim kaloszem na każdej nodze oraz w monopłetwę obejmującą obie nogi. Ilustracje wygenerowane przez system AI Copilot (Microsoft) na podstawie opisu modelu matematycznego [16]
Fig. 2. a) Conceptual diagram of a humanoid robot transformed into a humanoid–sirenoid Morphobot; b) conceptual diagrams of a humanoid robot equipped with two fins with short boots on each leg, and with a monofin attached to both legs. Illustrations generated by the AI Copilot (Microsoft) system based on the mathematical model description [16]
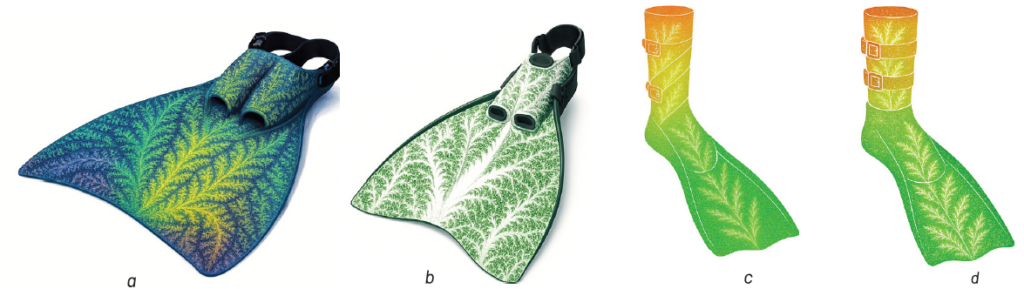
Fig. 2. Monofin and hybrid fin
Rys. 3. a) Monopłetwa dwupaskowa na dwie nogi; b) monopłetwa jednopaskowa na dwie nogi; c) płetwa z mocowaniem hybrydowym z paskami skośnymi na wydłużonym kaloszu; d) płetwa z mocowaniem hybrydowym w wersji z paskami równoległymi na części kaloszowej. Ilustracje wygenerowane przez system AI Copilot (Microsoft) na podstawie opisu modelu matematycznego [16]
Fig. 2. a) Two-strap monofin for both legs; b) single-strap monofin for both legs; c) fin with hybrid mounting using diagonal straps on an elongated boot; d) fin with hybrid mounting using parallel straps on the boot section. Illustrations generated by the AI Copilot (Microsoft) system based on the mathematical model description [16]
Rozwiązanie polegające na nałożeniu jednej monopłetwy na dwie nogi humanoida eliminuje redundancję funkcjonalną. Dlatego korzystniejsze jest zastosowanie części ogonowej zintegrowanej bezpośrednio z monopłetwą, która zapewnia większą niezawodność niż płetwa nakładana na obie nogi. Najwyższy poziom redundancji funkcjonalnej uzyskuje się w przypadku humanoida, wyposażonego w dwie oddzielne płetwy – na lewą i prawą nogę. Płetwy te powinny być osadzone w wydłużonych kaloszach sięgających do połowy łydki, wyposażonych w co najmniej dwa paski mocujące z klamrami. Takie rozwiązanie, określone jako mocowanie hybrydowe, zapewnia możliwość kontynuacji zadania nawet w przypadku utraty jednej płetwy.
8. Wnioski
Na podstawie literatury i badań własnych można wyciągnąć następujące wnioski:
Integracja teorii i praktyki – zastosowanie praw hydrodynamiki i skalowania w projektowaniu płetw dla robotów humanoidalnych pokazuje, że wiedza dydaktyczna o pływaniu może być skutecznie przeniesiona do inżynierii podwodnej.
Dominująca rola długości płetwy – analiza wskazuje, że długość płetwy ma kluczowy wpływ na efektywność lokomocji, co stanowi podstawę do obliczeniowego doboru parametrów w zależności od zadań robota.
Hybrydowe mocowanie płetw – połączenie stabilności płetw kaloszowych z elastycznością paskowych tworzy rozwiązanie optymalne z punktu widzenia redundancji funkcjonalnej, zapewniające zarówno efektywne przenoszenie siły, jak i łatwość serwisowania oraz wymiany w warunkach eksploatacyjnych.
Walor aplikacyjny – proponowane rozwiązania mogą znaleźć zastosowanie w budownictwie hydrotechnicznym i technice sanitarnej, umożliwiając robotom wykonywanie zadań ryzykownych dla człowieka, takich jak prace w kesonach, kanałach czy zbiornikach.
Perspektywa rozwoju – opracowane modele i mechanizmy stanowią punkt wyjścia do dalszych badań nad bioinspirowanym projektowaniem robotów wodnych, które mogą wspierać zarówno bezpieczeństwo pracy, jak i efektywność procesów budowlanych i inspekcyjnych.
Znaczenie międzynarodowe – przedstawione rozwiązania stanowią wkład w rozwój badań nad hydrodynamiką płetw i mogą inspirować konstruktorów robotów humanoidalnych, do wdrażania hybrydowych mechanizmów mocowania. Dzięki temu możliwe staje się projektowanie maszyn zdolnych do szybkiego i bezpiecznego przemieszczania się w środowisku podwodnym, co otwiera nowe perspektywy dla budownictwa hydrotechnicznego, techniki sanitarnej oraz praktycznych zastosowań w zadaniach ryzykownych dla człowieka.
Redundancja – chociaż konfiguracja z monopłetwą może wykazywać przewagę nad układem dwóch płetw w zakresie prostoty konstrukcji oraz stabilności strugi napędowej, to ze względu na brak redundancji funkcjonalnej wariant ten należy odrzucić w rozważaniach dotyczących pływających robotów humanoidalnych. Monopłetwa może być rozwiązaniem atrakcyjnym jedynie w zastosowaniach rekreacyjnych, gdzie bezpieczeństwo i niezawodność systemu nie stanowią krytycznego ograniczenia.
Kontekst projektowy – w kontekście projektowym szczególną rolę odgrywa robot humanoidalno‑sirenoidalny typu Morphobot, którego konstrukcja umożliwia wymianę dolnego segmentu na część ogonową zintegrowaną z monopłetwą. Takie rozwiązanie, choć nadal ograniczone pod względem redundancji w porównaniu z układem dwóch niezależnych płetw, zapewnia większą spójność konstrukcyjną i lepszą kontrolę hydrodynamiczną niż klasyczna monopłetwa nakładana na obie nogi. Morphobot stanowi zatem przykład kompromisu między prostotą a funkcjonalnością, wskazując kierunek dalszych badań nad hybrydowymi systemami napędowymi w robotach pływających.
9. Posłowie
Przedstawione ilustracje i rozwiązania powstały w wyniku twórczej współpracy autora z AI Copilot (Microsoft), [16]. Proces ten ukazuje nową jakość w praktyce naukowej: sztuczna inteligencja nie zastępuje człowieka, lecz wspiera go w precyzyjnym formułowaniu treści, wizualizacji koncepcji oraz w poszukiwaniu interdyscyplinarnych inspiracji. Wspólne działanie człowieka i AI otwiera przestrzeń dla innowacji, w której matematyka, inżynieria i sztuka spotykają się w jednym nurcie. Posłowie stanowi świadectwo, że współpraca z inteligentnymi narzędziami może wzbogacać proces badawczy, nadając mu zarówno praktyczny, jak i estetyczny wymiar. Piękno fraktali Barnsleya, splecione z techniczną precyzją modeli hydrodynamicznych, ukazuje, że nauka i sztuka mogą współistnieć w jednym obrazie. Takie połączenie inspiruje do dalszych poszukiwań, w których wiedza techniczna nabiera niecodziennego, twórczego charakteru.
10. Literatura
[1] Bartkowiak, E. (1999). Pływanie sportowe: Podstawy teoretyczne, sportowa technika pływania, motoryczność pływaka, uczenie się i nauczanie pływania, technologia treningu [Competitive swimming: Theoretical foundations, swimming technique, swimmer’s motor skills, learning and teaching swimming, training technology]. Centralny Ośrodek Sportu.
[2] Bianchi, G., Cinquemani, S., & Resta, F. (2021). Bio-inspired design of an underwater robot exploiting fin undulation propulsion. Applied Sciences, 11(6), 2556. https://doi.org/10.3390/app11062556
[3] Chung, C., & Nakashima, M. (2014). Swimming humanoid robot “SWUMANOID” as an experimental platform for research of human swimming. Journal of Robotics and Mechatronics, 26(2), 265–272. https://doi.org/10.20965/jrm.2014
[4] Chen, L., Bi, S., Cai, Y., & Qiu, H. (2022). Design and hydrodynamic experiment research on novel biomimetic pectoral fins of a ray-inspired robotic fish. Machines, 10(8), 606. https://doi.org/10.3390/machines10080606
[5] Czabański, B., Fiłon, M., & Zatoń, K. (2003). Elementy teorii pływania [Elements of the theory of swimming]. Akademia Wychowania Fizycznego.
[6] De Matos, C. C., Guignard, B., De Souza Castro, F., & Guimard, A. (2023). Effects of paddles and fins on front crawl kinematics, arm stroke efficiency, coordination, and estimated energy cost. Frontiers in Physiology, 14, 1174090. https://doi.org/10.3389/fphys.2023.1174090
[7] Dybińska, E. (2011). Uczenie się i nauczanie pływania: Zagadnienia wybrane [Learning and teaching swimming: Selected issues]. Akademia Wychowania Fizycznego.
[8] Eloy, C. (2011). Optimal Strouhal number for swimming animals. arXiv. https://arxiv.org/abs/1102.0223
[9] Ernest, K. (1992). Fizyka sportu [Physics of sport]. Wydawnictwo Naukowe PWN.
[10] Garayev, K., & Murphy, D. W. (2024). Hydrodynamic scaling of metachronal swimming. Physical Review Fluids, 9(11), L111101. https://doi.org/10.1103/PhysRevFluids.9.L111101
[11] Khatkar, S., & Singh, K. (2024). Biomechanical insights in swimming: Techniques for performance enhancement and injury risk reduction. International Journal of Current Research and Academic Review, 12(10). https://doi.org/10.20546/ijcrar.2024.1210.008
[12] Lauder, G. V., & Drucker, E. G. (2002). Experimental hydrodynamics of fish locomotion: Functional insights from wake visualization. Integrative and Comparative Biology, 42(2), 243–257. https://doi.org/10.1093/icb/42.2.243
[13] Lauder, G. V., & Madden, P. G. A. (2007). Fish locomotion: Kinematics and hydrodynamics of flexible foil-like fins. Experiments in Fluids, 43, 641–653. https://doi.org/10.1007/s00348-007-0357-4
[14] Lighthill, M. J. (1969). Hydromechanics of aquatic animal propulsion. Annual Review of Fluid Mechanics, 1(1), 413–446. https://doi.org/10.1146/annurev.fl.01.010169.002213
[15] Liu, J., & Hu, H. (2006). Biologically inspired robots: Fish-like locomotion and hydrodynamics. International Journal of Automation and Computing, 3(4), 336–347. https://doi.org/10.1007/s11633-006-0336-9
[16] Microsoft Corporation. (2025). Sugestie językowe i twórcze wspomaganie treści: Materiały wspomagające proces redakcyjny oraz uwagi dotyczące cytowania źródeł AI w publikacji naukowej [Unpublished internal material]. Microsoft.
[17] Minetti, A. E. (2006). Economy and efficiency of swimming at the surface with fins of different sizes and stiffness. IRIS Institutional Repository, University of Milan.
[18] Seo, J. H., Zhou, J., & Mittal, R. (2025). Scaling laws for caudal fin swimmers incorporating hydrodynamics, kinematics, morphology, and scale effects. arXiv. https://arxiv.org/abs/2507.11665
[19] Toussaint, H. M., & Beek, P. J. (1992). Biomechanics of competitive front crawl swimming. Sports Medicine, 13(1), 8–24. https://doi.org/10.2165/00007256-199213010-00002
[20] Triantafyllou, M. S., Triantafyllou, G. S., & Yue, D. K. P. (2000). Hydrodynamics of fishlike swimming. Annual Review of Fluid Mechanics, 32, 33–53. https://doi.org/10.1146/annurev.fluid.32.1.33
[21] Triantafyllou, M. S., Triantafyllou, G. S., & Gopalkrishnan, R. (1991). Wake mechanics for thrust generation in oscillating foils. Physics of Fluids A: Fluid Dynamics, 3(12), 2835–2837. https://doi.org/10.1063/1.858173
[22] Waade, B. (Ed.). (2003). Pływanie sportowe i ratunkowe: Teoria i metodyka [Competitive and lifesaving swimming: Theory and methodology]. Akademia Wychowania Fizycznego.
[23] Zamparo, P., Pendergast, D. R., Termin, B., & Minetti, A. E. (2006). Economy and efficiency of swimming at the surface with fins of different size and stiffness. European Journal of Applied Physiology, 96(4), 459–470. https://doi.org/10.1007/s00421-005-0075-7
[24] Zamparo, P., Pendergast, D. R., Termin, B., & Minetti, A. E. (2002). How fins affect the economy and efficiency of human swimming. Journal of Experimental Biology, 205(17), 2665–2676. https://doi.org/10.1242/jeb.205.17.2665